
Robotic Underwater Tunnel Repair: Rock Trap Debris Removal and Trash Rack Replacement
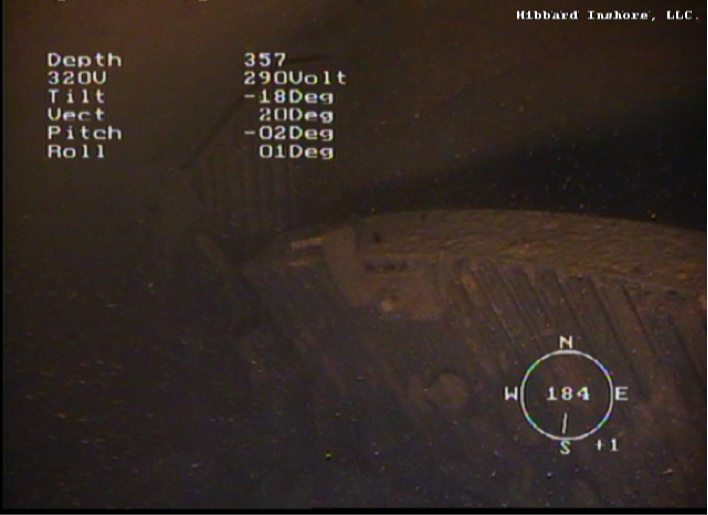 Top of Displaced Trash Rack Section
Top of Displaced Trash Rack Section
A Hydro Electric Plant was faced with debris entering the turbines causing damage. The trash rack at the intake had failed and several miles down the tunnel, there was rock catcher, inline trash rack and surge shaft. This project was the result of the earlier inspection project detailed separately in the Hibbard Inshore website Project Gallery. During that inspection for a hydroelectric facility, Hibbard Inshore’s ROVs were able to identify that there was a conduit that was obstructing the surge shaft, that the rock trap was full of sediment and that the trash rack at the downstream end of the rock trap had failed. The rock trap and trash rack were located at approximately 355’ of depth. One of the sections of the trash rack had detached and moved down the penstock to approximately 850’ of depth. The rock trap was found to be in a condition where its drain was no longer clearing sediment and the 100’ long trap was overflowing with sediment and rock. There were approximately 277 cubic yards of debris identified, and the rock trap was capable of holding 133 cubic yards of debris before its dividers were completely covered.
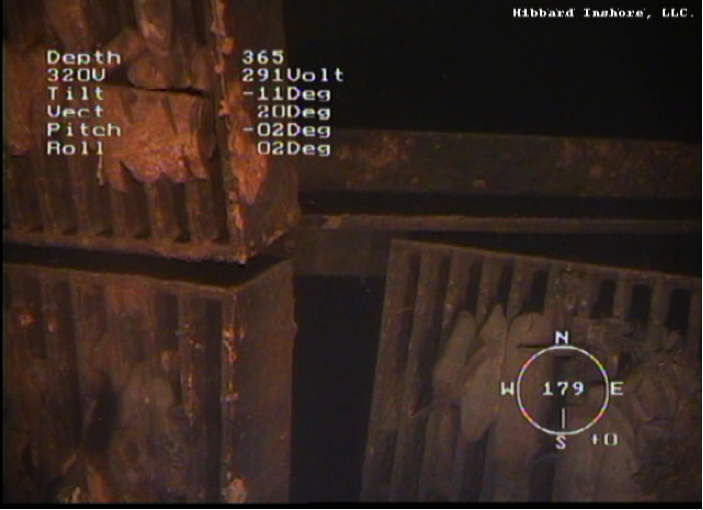 Trash Rack Sections Out of Alignment and failed support beam
Trash Rack Sections Out of Alignment and failed support beam
The tunnel for the power plant was very long and had been in use for many years. In addition to being used to generate power for the region, the tunnel was the primary method for providing additional water for irrigation in the region. The dam owner wanted a repair method that didn’t involve dewatering in order reduce risk of tunnel collapse during the repairs and to allow them to operate occasionally throughout the repair process. The repair method would need to be designed around having all equipment out of the tunnel quickly in case the tunnels needed to be used to provide water downstream. Because of these existing conditions, the dam owner wanted Hibbard Inshore to provide a robotic solution for removing the debris and damaged components, dredging the sediment out of the rock trap and then repairing the trash rack.
 Navajo ROV with Manipulator to Perform Support Work for Mohican ROV
Navajo ROV with Manipulator to Perform Support Work for Mohican ROV
The first phase of the project was to attach tooling to the ROVs in order to perform the various cutting and lifting operations that would be necessary to remove the debris, conduit, and damaged racks from deep underwater. The surge shaft was used as an access point into the tunnel because it was more practical to lift the ROVs, pump and tooling into the 5’ diameter shaft than it would have been to try to access the area all the way from the intake end several miles away. In order to fit into the shaft, a customized tooling skid had to be built for the Hibbard Inshore Mohican ROV.
 Mohican ROV with Rotary Saw on top of Dredge Pump Skid
Mohican ROV with Rotary Saw on top of Dredge Pump Skid
This skid would hold two five-function manipulator arms which could be used to operate tooling and to grab onto the structures to allow cuts to be made and rigging to be placed. The skid was built to allow the arms to fold at their shoulder so they would hang underneath the vehicle as it was inside the surge shaft. This allowed the vehicle to fit into the work space dimensionally speaking. Cameras were added to the manipulator arms so the pilot could independently monitor the view from each arm.
The first tool attached was a rotary saw which was used to cut through the steel conduit that was lying across the surge shaft. This conduit was cut out and removed by the vehicle through the top of the surge shaft.
 ROV Rotary Saw on Manipulator Arm
ROV Rotary Saw on Manipulator Arm
Once the conduit had been removed from the surge shaft, this gave the Mohican and Navajo vehicles free and clear access into the tunnel. They were flown into the tunnel, and a custom, high-head trash pump was lifted into the shaft. The pump was able to take solids up to 2” in diameter and pump them the lateral distance of 100’ as well as 355’ vertically to remove the sediment from the rock trap. The Mohican used its arms to maneuver the pump suction hose into all of the areas between the divider walls in the 100’ long trap to remove as much sediment and debris as possible in order to restore functionality to the rock trap.
Once the sediment was removed from the rock trap, the Mohican ROV was re-fit with a centerless saw that would allow it to make the deep cuts necessary to remove the existing trash rack support beam. The beam had buckled during the failure of the trash rack and needed to be replaced by the Hibbard Inshore team.
 Bent Trash Rack Support Beam on Ground
Bent Trash Rack Support Beam on Ground
Once the ROV had cut the beam and removed it through the surge shaft, the ROV went about the task of removing the 2 sections of the existing trash rack that were damaged too badly to be put back into place. One of these sections had slid to a depth of 850’ down a penstock with a 45 degree angle. The Hibbard team used the Mohican ROV along with the Navajo ROV, a pneumatic lift-bag, rigging, winches and hoists to accomplish the retrieval of the trash rack sections.
 Damaged Trash Rack Section Being Removed Through Surge Shaft with ROV Lift Bag
Damaged Trash Rack Section Being Removed Through Surge Shaft with ROV Lift Bag
They used the ROVs to attach lines to each section, used the lift bag to make them neutrally buoyant for lateral transport through the tunnel back to the surge shaft, and then lifted them through the surge shaft to the surface.
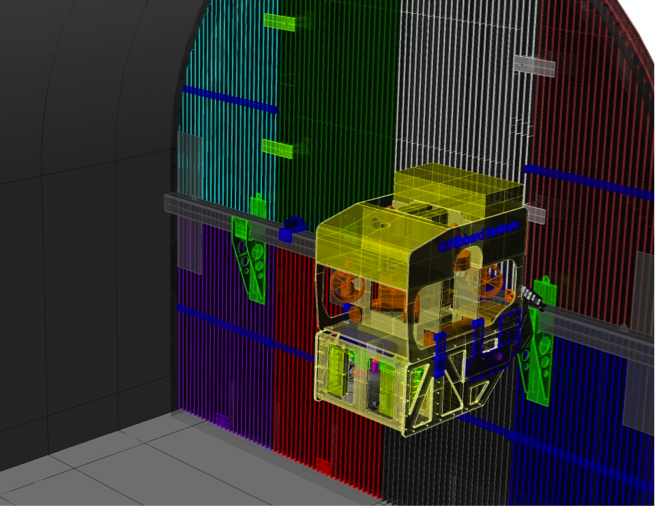 Hibbard CAD of the Mohican ROV Installing the New Trash Rack
Hibbard CAD of the Mohican ROV Installing the New Trash Rack
Once the damaged trash rack sections were recovered, the rebuild process started by installing a new support beam to replace the failed beam. The remaining trash rack sections were slightly out of alignment and were brought back into alignment and structurally supported by bolting into the new support beam. The Hibbard Inshore crew went about installing newly designed trash rack sections. The Hibbard Inshore team redesigned the trash rack sections and support beam so that they would have increased strength and could be installed by a ROV. Brackets would be used to hold the sections together with bolts, and the sections would also be secured to the new beam.
 New Trash Rack Support Beam for ROV Installation
New Trash Rack Support Beam for ROV Installation
The new beam would have further bracing at each end to support the rack sections. In order to make these repairs, first, the new support beam was installed by the Mohican and Navajo ROVs. Once the beam was in place, the new trash rack sections, brackets and bolts were put into place. The Mohican ROV was fit with a tool to torque nuts onto the bolts which pulled the trash rack sections into place properly.
 Hibbard Inshore Mohican and Navajo ROVs at Completion of Work
Hibbard Inshore Mohican and Navajo ROVs at Completion of Work
During this project, Hibbard Inshore was able to help the customer to perform an inspection on areas of its intake tunnels that were difficult to reach, and they were able to do this without dewatering. Further, once problem areas were identified, Hibbard Inshore’s team went to work to devise tooling and methods to remove debris, remove damaged materials, and replace a trash rack in those same, difficult to reach areas. This allowed the customer to reduce stress to the tunnel system and to avoid the safety risks of using confined entry crews. Hibbard Inshore is currently working on the third phase of this project for the customer in order to place temporary bulkheads approximately 350’ underwater in each of the two penstocks so that the turbine shut off valves at the second plant can be replaced without dewatering the tunnel system.







